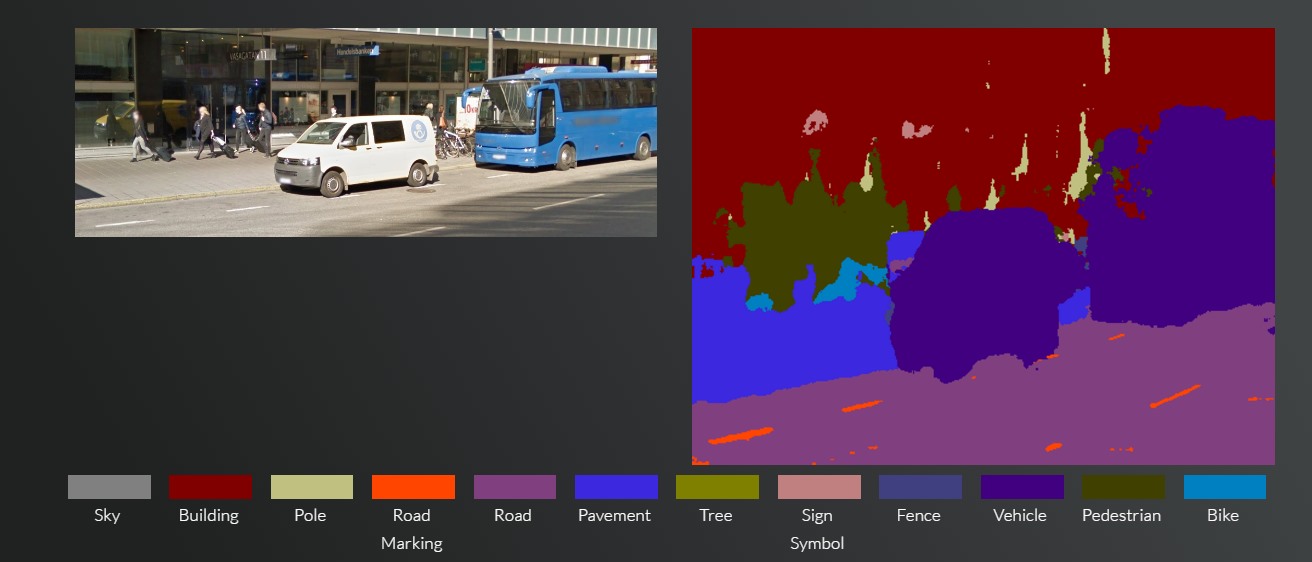
Forskare vid Cambridge universitet har utvecklat två smartphonebaserade system som bygger på deep learning och påminner om hur autonoma fordon läser av sin omgivning.
De båda systemen är oberoende av GPS och använder sig enbart av visionsensorer (vanliga kameror), precis som vi människor enbart använder ögonen för att hålla koll i trafiken. Detta istället för betydligt dyrare laser- och radarsensorer som de flesta självkörande bilar har idag. Fortsätt läsa ”Nytt visionsystem kan ge smartare robotdammsugare”