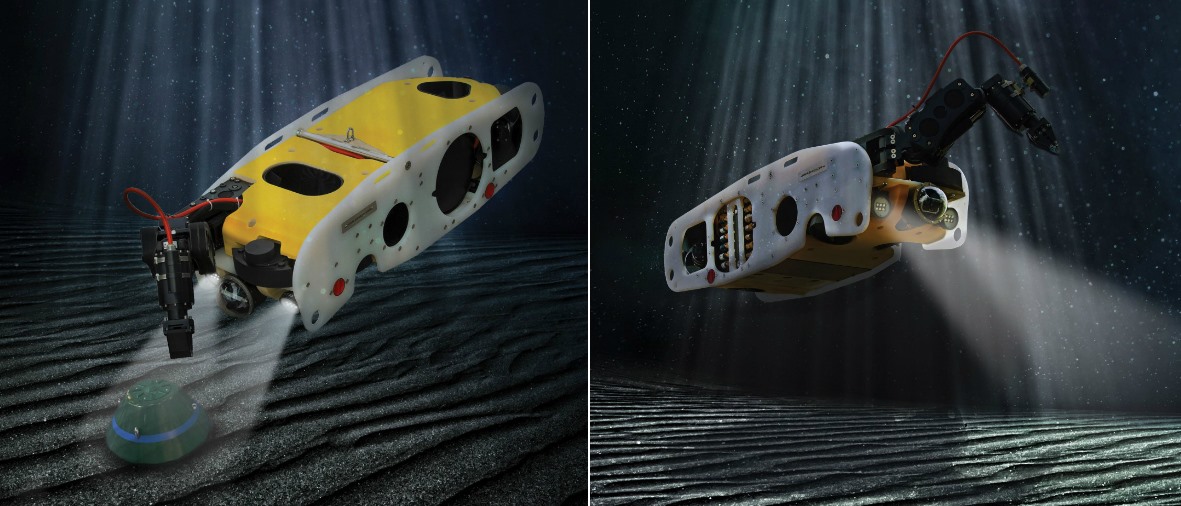
Som ett led i att bemöta det ökande terrorhotet har SAAB utvecklat en fjärrstyrd undervattensrobot som kan lokalisera och neutralisera bomber under vattenytan.
I samarbete med U.S. Combat Terrorism Technical Support Organization (CTTSO) har SAAB under 18 månaders tid utvecklat den fjärrstyrda undervattensroboten Sea wasp som är en så kallad Remotely Operated Vehicle (ROV). Den kan både lokalisera, identifiera och neutralisera improviserade sprängmedel (IED) under vatten och är särskilt framtagen för att användas vid hamnar. Fortsätt läsa ”Saabs undervattensrobot Sea Wasp ska neutralisera terrorbomber”