Ett team av ingenjörer från MIT och Princeton University har utvecklat ett robotsystem som med hjälp av AI kan plocka upp valfritt objekt ur en back full med saker och lägga det i en annan, vilket är svårare än det låter när man är en robot.
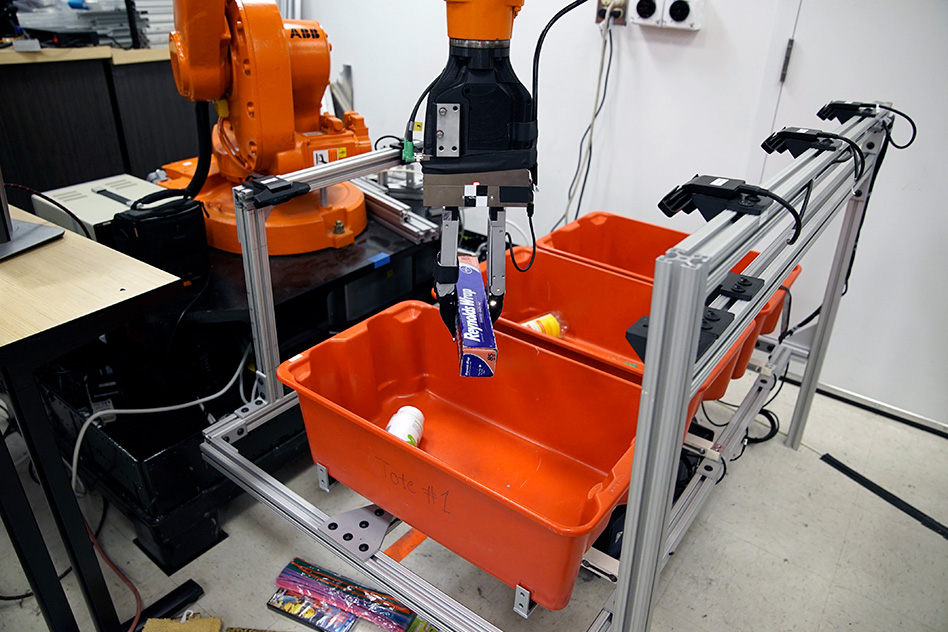
Robotsystemet består av en vanlig ABB-industrirobot som har försetts med ett specialanpassat gripdon. En uppsättning kameror används också för att identifiera och klassificera objekten som plockas upp av roboten. Till skillnad från hur de flesta andra går till väga vid denna typ av uppgifter plockar MIT:s robot först upp objektet för att därefter analysera vilken typ av objekt det handlar om. När objektet har separerats från de andra sakerna i backen är det nämligen lättare att identifiera. Fortsätt läsa ”MIT:s Robo-picker är framtidens lagerarbetare”

