Waldemar Ingdahl och Anders Sandberg, författare till boken ”Cities on the edge”, samt Lars Asplund, robotexpert och professor i datavetenskap vid Mälardalens Högskola, deltog den 28 december 2010 i ett radioprogram om robotar och den tredje industriella revolutionen i Sveriges Radio P4 Västmanland. Programmet går att höra på nätet i 30 dagar. Cirka tre minuter in i ljudklippet, efter nyheterna, börjar programmet.
Ingdahl intervjuades direkt från Marocko över telefon. Tyvärr var ljudkvalitén på telefonsamtalet väldigt dålig och det var bitvis svårt att uppfatta vad han sa, men bland annat förutspådde han att telenärvaro kommer vara stort om 100 år. Det vill säga att man kopplar upp sig mot en drönarrobot, vars kropp man sedan styr. Fortsätt läsa ”Hur kommer robotarna se ut om 100 år?”
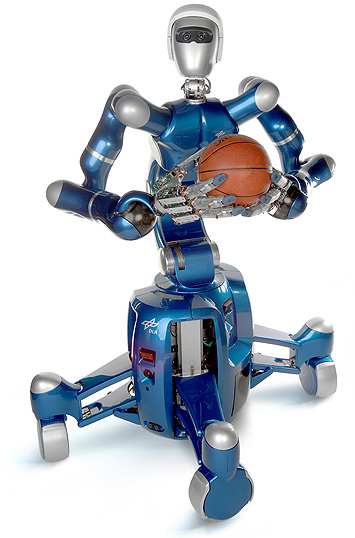
Rollin’ Justin heter en robot från tyska rymdfartsmyndigheten DLR som är en prototyp av en servicerobot och är tänkt att användas i rymden för att laga satelliter, berättar Carsten Preusche från DLR-Institut für Robotik und Mechatronik. Justin kommer inte rulla runt så mycket i rymden, av förklarliga skäl. Sannolikt kommer enbart överkroppen sitta fastmonterad någonstans, likt NASA:s Robonaut.
Justin kommer att fjärrstyras från jorden där operatören kommer att både kunna se och känna vad Justins upplever uppe i rymden. En stereoskopisk kamera gör att operatören får en tredimensionell bild av omgivningen och sensorer i fingrarna kan känna av texturer på föremål. Målet är dock att få roboten att kunna arbeta helt autonomt.
Franska Aldebaran Robotics har uppdaterat sin mini-humanoid Nao som nu har fått längre armar, förbättrad motion engine med mycket mjukare gång och blivit allmänt mer robust. Nao kan även känna igen ansikten och bilder och komma ihåg dessa nästa gång de dyker upp. En annan ny funktion är en ”fall manager” som känner av när Nao håller på att ramla varvid armar och ben intar nya positioner för att dämpa fallet.
Erico Guizzo från IEEE Spectrum har träffat grundaren och VDn för Aldebaran, Bruno Maisonnier, som berättar att Nao används på universitet och företag i 30 länder och även i den årliga robotfotbollstävlingen RoboCup. 1.065 Nao-robotar har sålts i dagsläget. Styckpriset ligger på ungefär €12.000 (112.000 SEK), så det är ingen leksaksrobot man köper till ungarna i julklapp direkt.
Nao har även fått ett nytt huvud med förbättrad temperaturkontroll, Wifi-kommunikation och in-/utgående ljud, skriver IEEE.
I nedanstående video demonstrerar Nao några av sina färdigheter. Rörelserna är som synes mycket mjuka och naturliga och Nao kan bland annat balansera på ett ben.
Pi4 Workerbot heter en robot från tyska Fraunhoferinstitutet (skaparna av ljudformatet MP3) som är tänkt att ersätta mänsklig arbetskraft vid löpande bandet när de är sjuka. Istället för att miljön anpassats till roboten har man i detta fall anpassat roboten efter miljön. Workerbot är lika stor som en människa och tanken är att den ska kunna arbeta under samma förutsättningar som mänsklig arbetskraft.
Roboten har två armar och tre ”ögon” i form av högupplösta kameror, varav en i pannan som kan filma i 3D. De båda armarna har sju frihetsgrader, till skillnad från de flesta industrirobotar som på sin höjd är är sexaxliga. Det gör att armarna blir mer lika sina mänskliga motsvarigheter.
Man kan verkligen tala om fingertoppskänsla i detta fall, då sensorer i Workerbots ”fingrar” gör att den kan greppa och lyfta ett ägg utan att det krossas.
Workerbot kan alltså analysera objekt tredimensionellt i realtid och montera ihop dem. Blir det inte rätt på en gång så provar den sig fram genom trial and error.
En lite rolig detalj är att roboten även kan visa genom ansiktsuttryck om den är glad eller uttråkad. När den har mycket jobb att stå i så är den glad och när den har lite att göra visar den en uttråkad min. På den punkten kanske den inte är fullt så lik sina mänskliga medarbetare.
Det är via det EU-finansierade Pisaprojektet som Workerbot utvecklats och syftet är att tillverkningsindustrin i Europa ska bli mer flexibel och konkurrenskraftig, skriver Ny Teknik. Det kan bli tuffa tider för bemanningsföretagen i framtiden med andra ord, när robotarna jobbar dygnet runt, oavlönat och dessutom inte klagar på arbetsmiljön.
För en månad sen publicerades en artikel om de snabbaste bipedala robotarna här på Robotnyheter. Nu ser det ut som de kan få hård konkurrens från en ny spelare, nämligen Athlete Robot. Denna bipedala robot skiljer sig även markant från de tre humanoider som togs upp i den förra artikeln. Athlete, som är skapad av den japanska forskaren Ryuma Niiyama med målet att ta fram en springande bipedal robot, har nämligen utrustats med ”riktiga” muskler.
Varje ben har sju uppsättningar artificiella muskler där varje uppsättning har en till sex pneumatiska aktuatorer som funktionsmässigt motsvarar muskler i människokroppen. Det gör att roboten får en mycket mer naturlig och människolik springstil, till skillnad från de stelbenta löpstilar vi hittills sett hos Asimo och liknande humanoider.
Hela underbenet på Athlete är mycket lika de fjädrande benproteser som dubbelamputerade löpare använder. Niiyama säger till IEEE att han inspirerats av just dessa proteser, som bland annat den sydafrikanska paralympicslöparen Oscar Pistorius, även kallad ”Blade Runner”, använder. På varje fot sitter trycksensorer samt en rörelsekänslig sensor i torson.
Frågan är hur lång tid det tar innan de bipedala robotarna nu bokstavligt talat springer ikapp de mänskliga världsmästarna i löpning och senare även föräras ett eget officiellt ”Robolympics”. Det får framtiden utvisa.
Mowgli – den hoppande roboten
Athlete springer, precis som en människa, genom att ständigt falla framåt och utnyttja den studsenergi som uppstår vid nedslaget av foten. I dagsläget klarar den dock maximalt att ta tre till fem steg i en hastighet av 1,2 meter per sekund innan den ramlar, vilket inte blir något 100-meterslopp direkt. Forskarna är dock optimistiska och tror att de efter en del finjusteringar ska kunna få ut Athlete på en riktig löparbana.
Tidigare har Niiyama forskat på en annan naturlig rörelse, nämligen hopprörelsen. Det resulterade i den bipedala, hoppande roboten Mowgli som mest liknar en storväxt groda. Videon nedan är från 2007.
 Waldemar Ingdahl och Anders Sandberg, författare till boken ”Cities on the edge”, samt Lars Asplund, robotexpert och professor i datavetenskap vid Mälardalens Högskola, deltog den 28 december 2010 i ett radioprogram om robotar och den tredje industriella revolutionen i Sveriges Radio P4 Västmanland. Programmet går att höra på nätet i 30 dagar. Cirka tre minuter in i ljudklippet, efter nyheterna, börjar programmet.
Waldemar Ingdahl och Anders Sandberg, författare till boken ”Cities on the edge”, samt Lars Asplund, robotexpert och professor i datavetenskap vid Mälardalens Högskola, deltog den 28 december 2010 i ett radioprogram om robotar och den tredje industriella revolutionen i Sveriges Radio P4 Västmanland. Programmet går att höra på nätet i 30 dagar. Cirka tre minuter in i ljudklippet, efter nyheterna, börjar programmet.