Harvards nya deltarobot i millimeterskala är ruskigt snabb och har bland annat potential att kunna användas för eliminering av darr på handen vid ögonkirurgi.
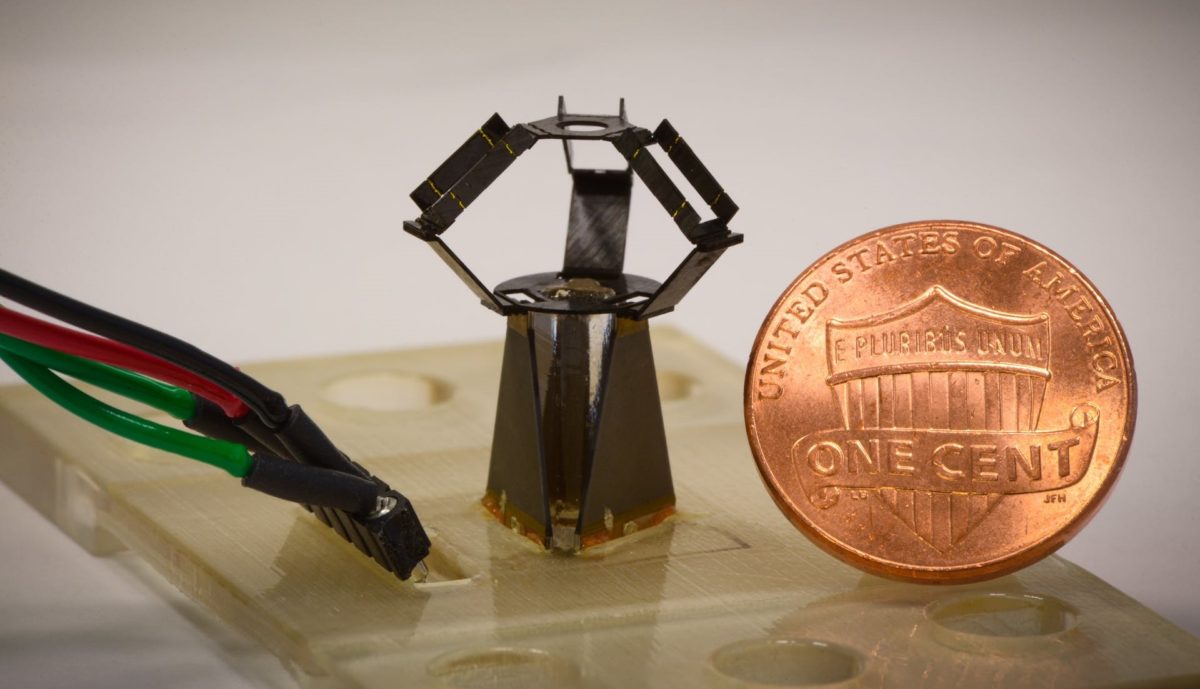
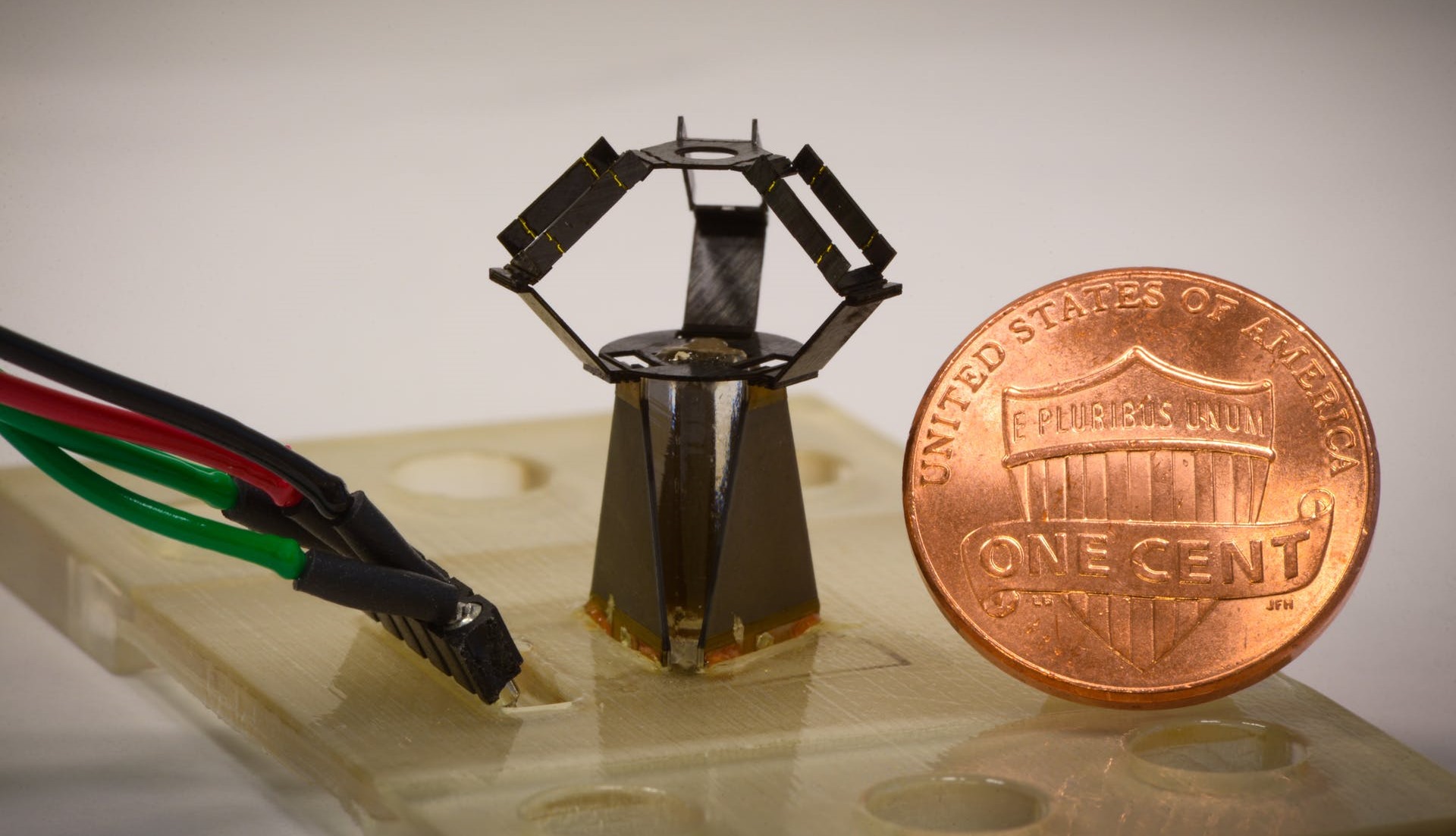
Deltarobotar är flitigt använda inom bland annat livsmedelsindustrin då de är mycket snabba på att plocka och placera objekt från löpande band. Nu har forskare vid Harvards Wyss Institute lyckats miniatyrisera tekniken och utvecklat en robot kallad milliDelta som är i millimeterstorlek (15 x 15 x 20 millimeter) och dessutom extremt mycket snabbare än traditionella deltarobotar.
Roboten är tillverkad med en teknik kallad popup-MEMS som ursprungligen togs fram av Harvard 2011 och påminner om origami eller en popup-bok där roboten viks ihop till ett 3D-objekt utifrån ett 2D-ark. En annan robot som har tillverkats med denna metod är RoboBee.
Trots robotens ringa storlek och det faktum att den har vikts ihop är den väldigt flexibel och kan med hjälp av piezoelektriska aktuatorer uppnå hög precision och hastigheter som är 15-20 gånger högre än hos konventionella deltarobotar. Roboten kan arbeta inom ett område på 7 kubikmillimeter och är enligt Harvardforskarna ideal för tillämpningar inom mikromontering, mikromanipulation (plocka och placera) samt för att minska darr på handen vid mikrokirurgi.
Det innebär att roboten skulle kunna användas vid näthinnekirurgi för att eliminera darrningar från läkarens hand om den integrerades med för ändamålet avsedd kirurgisk utrustning. Forskarna har i ett första test fått sin milliDelta-robot att kompensera för de små darrande rörelser som uppstår vid spetsen av en tandpetare då den hålls av en människohand. I videon ovan från Harvard visas hur deras robot med en frekvens på hela 75 hertz kan röra sig i ett cirkelmönster på 1,5 millimeter.