
Shybot heter en lite udda robot på sex hjul vars enda syfte är att åka omkring i Sonoraöknen i USA medan den undviker alla människor den upptäcker. Roboten är kameraförsedd och när den upptäcker en människa flyr den i motsatt riktning. Roboten är även försedd med GPS och på denna sida kan man spåra ShyBot i ”realtid” på en karta. Det är den italienska konstnären Norma Jeane som ligger bakom detta robotkonstprojekt.
Roboten Cozmo från Anki säljs officiellt fortfarande endast i USA, även om det numera går att få tag på importerade versioner i Sverige för över det dubbla priset. Anki skriver dock på sin webbsida att de utvärderar ytterligare marknader under 2017. För den som är nyfiken på vad man kan göra med det tillhörande SDK:t har Anki lagt upp ett gäng videoklipp på sin utvecklarkanal på Youtube. Där visas hur man installerar SDK:t för iOS, Android, Windows och MacOS.
I videoklippet nedan visas tio små exempelprogram i Python på hur man kan programmera Cozmo så roboten beter sig precis som man själv vill.
Man kan även installera Flask, ett webbaserat mikroramverk för Python, som gör att man kan fjärrstyra Cozmo i realtid med tangentbordet. Det är klassisk WASD-styrning som gäller och man kan även se sig omkring med musen så följer Cozmo efter med blicken, likt hur styrningen i många datorspel fungerar. Det finns även fler funktioner som demonstreras i videon nedan.
Forskare vid Brown University har tagit fram roboten Iorek som bygger på en Baxter-robot från Rethink Robotics. Roboten kan plocka upp ett specifikt objekt från ett bord genom att man pratar med den och den kan även se vilket objekt man pekar på via en Kinectkamera som sitter monterad på huvudet. Det nya med Iorek är dock att den även kan ställa en kontrollfråga ifall den upptäcker att det ligger flera likadana objekt på bordet. Roboten placerar då sin ena hand över objektet och frågar ”Denna?”, varefter man får bekräfta om det var rätt objekt. Iorek kan till och med känna av och anpassa sig efter när man gör fel och till exempel kallar en skål för en sked.
Bat Bot B2 heter en flygande robot, utvecklad av forskare vid Caltech University, som har designats efter en fladdermus och flyger precis som en. Fladdermusroboten väger 93 gram och har vingar gjorda av ett 56 mikrometer tunt silikonbaserat membran. Ombord finns en liten dator samt IMU och andra sensorer som gör att den kan flyga autonomt. Syftet med roboten är dels att få större insikt om hur verkliga fladdermöss flyger, men även att kunna ta fram säkrare och mer energieffektiva flygande robotar.
Blinda Steve Mahan har genom åren fått agera testförare i Googles självkörande bil-projekt, som sedermera blev det separata företaget Waymo. 2012 åkte han i sällskap av en testförare och 2014 på en inhägnad bana. 2015 var det dock första gången som en helt självkörande bil, utan ratt eller pedaler, släpptes ut på allmänna trafikerade vägar med Steve som ”förare”. I ett nyuppladdat klipp från Waymo får vi se lite mer av hur det såg ut när Steve åkte i den självkörande bilen på gatorna i Austin, Texas.
Tyska Festo kommer visa upp sina senaste konceptrobotar på Hannovermässan 2017 i april. Som vanligt har man hämtat inspiration från naturens skapelser och använder sig av pneumatik. Den ena roboten kallas BionicCobot och är en 7-axlig robotarm vars rörelsemönster har modellerats efter en mänsklig arm. Den ska kunna samarbeta med människor vid till exempel montering, inte helt olikt hur ABB:s tvåarmade robot YuMi fungerar.
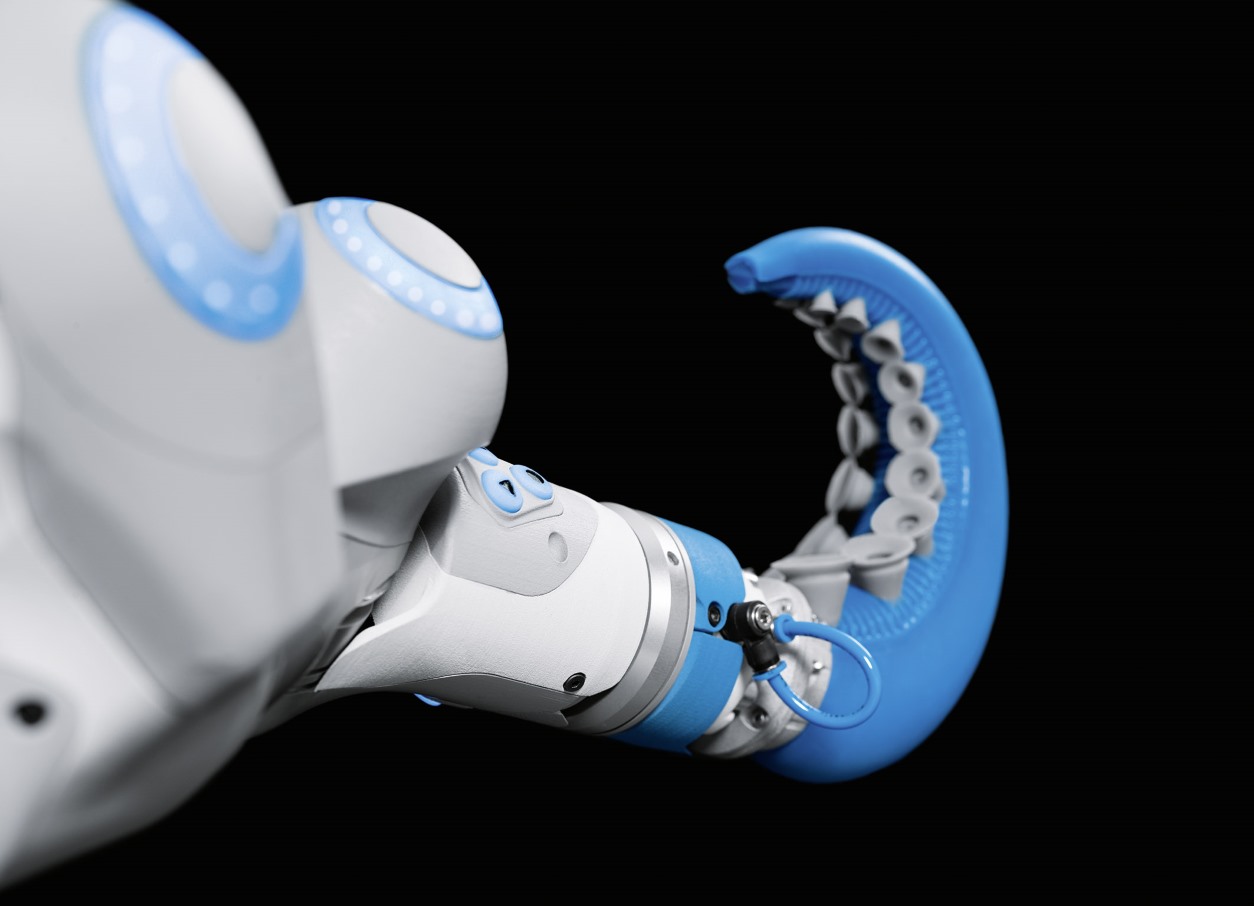
BionicMotionRobot heter en annan konceptrobot som inspirerats av elefantens snabel. Den klarar av att lyfta objekt på upp till tre kilo och kan bland annat utrustas med Festos nya OctopusGripper, ett böjbart gripdon av silikon som liknar en bläckfisktentakel med många små sugkoppar som håller fast objektet.
U.S. Army har skapat en fungerande granatkastare, kallad RAMBO (Rapid Additively Manufactured Ballistics Ordnance), med hjälp av en 3D-skrivare där till och med granaten är 3D-utskriven. Det var endast fjädrar och fästanordningar som inte gick att skriva ut med 3D-skrivare. Totalt tog det 75 timmar att skapa och montera granatkastaren.
SALTO (SAltorial Locomotion Terrain Obstacles) heter en liten robot som kan hoppa högre och snabbare än någon annan benförsedd robot. Den hoppar till och med högre än en människa från stillastående, trots att den är många gånger mindre. Men inte nog med att den kan hoppar över en meter högt, den kan även dubbelhoppa genom att ta spjärn mot ett fast föremål mitt i hoppet och på så vis inte bara nå ännu högre utan även ändra riktning på hoppet. Forskarna vid UC Berkeley, som utvecklat SALTO, har hämtat inspiration från galagon som är en släkte små primater med mycket god hoppförmåga.
Nasas Jet Propulsion Laboratory (JPL) håller på att utvärdera prototyper av nya robotar som ska kunna samla in prover från istäckta himlakroppar såsom Jupiters måne Europa. Det handlar om prototyper av robotar som bland annat har långa utfällbara robotarmar eller skjuter iväg projektiler som kan ta prover för att sedan halas in igen med hjälp av en lina. Ett av syftena med provinsamlingarna är att ta reda på om det finns liv på andra planeters månar. Förutom den utmanande terrängen måste robotarna klara av extrema temperaturer och strålning.
På tal om Nasa så har BBC har besökt University of Edinburgh för att göra ett reportage om Nasas robot Valkyrie som i en framtida version en dag förhoppningsvis ska kunna användas i kommande uppdrag på planeten Mars. Nasa har därför lånat ut några exemplar av Valkyrie till olika universitet för att de ska kunna utveckla roboten med artificiell intelligens, förmåga att ta sig fram och manipulera objekt.
Den tidigare NASA-ingenjören Mark Rober har under tre års tid konstruerat en darttavla kallad Automatic Bullseye. Det är en tavla som via sex Vicon-kameror i realtid kan spåra specialpreparerade dartpilar som kastas mot den och automatiskt justera sin position så pilarna nästan alltid prickar bullseye.
Avslutningsvis har vi musikvideon ”Robot’s Delight” med japanska robotar som rappar om sina förmågor. Videon fick utmärkelsen ”Best Video” vid 2017 ACM/IEEE International Conference on Human Robot Interaction (HRI 2017).