
DARPA har många strängar på sin robotlyra och i torsdags meddelade de att deras ARM-projekt (Autonomous Robotic Manipulation) nått sin andra milstolpe. En video lades upp där deras robotarm utförde 18 olika manipulationsuppgifter som att bland annat låsa upp en dörr och öppna den.
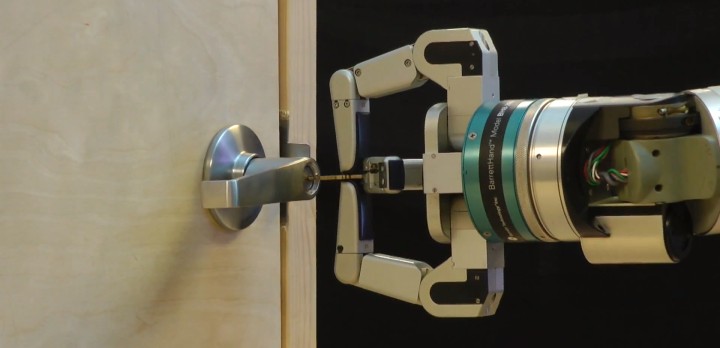
I videon nedan ser vi ARM-roboten bland annat använda en häftapparat, borrmaskin, greppa en skruvmejsel och låsa upp ett cylinderlås till en dörr som den sedan öppnar med handtaget. Roboten använder sig både av visuell och taktil sensorinformation för att lyckas med detta. Till exempel vickar den nyckeln fram och tillbaka i låset för att känna sig fram till rätt läge medan den trycker in den.
ARM-roboten är byggd av redan kommersiellt tillgängliga komponenter som inkluderar en arm, hand, hals och sensorer på huvudet. Den har en Barrett WAM-robotarm med sju frihetsgrader som manipulator med tre fingrar på handen varav två av dem kan sära på sig för att få ett optimalt grepp. Fingrarna är böjbara i två leder och handen har tryckkänsliga sensorer i fingrar och handflata.
Målet med projektet är att få fram en autonom robot som fungerar bättre än en människostyrd. Detta mål ska DARPA försöka nå genom att utveckla mjukvara och hårdvara som möjliggör för robotar att autonomt greppa och manipulera objekt i ostrukturerade miljöer där människor endast förser roboten med högnivåinstruktioner.
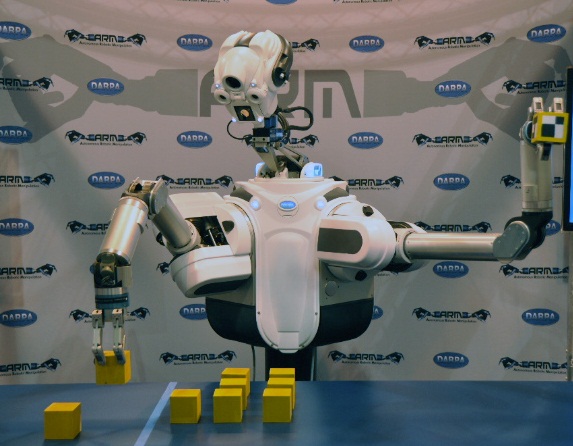
En mer människolik version av ARM-roboten visades upp på AUVSI 2010.
Tidigare har man även visat upp en mer människolik, tvåarmad version av roboten och nedan kan två videoklipp ses på denna, bland annat från AUVSI 2010.
DARPA bjuder även in allmänheten att skapa egna algoritmer till roboten via en simulator man kan ladda ner från deras webbsida. Där finns även mer informaton och foton på roboten.
Foto & video: DARPA