
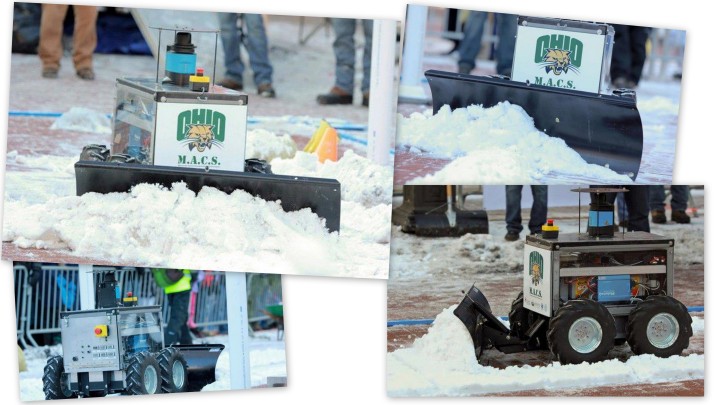
Roboten M.A.C.S. från Ohio universitet plogade banan med konkurrenterna och segrade även i år. Foto: Ohio University
Den 26-29 januari i år var det dags för den andra i ordningen av den årliga Autonomous Snowplow Competition i St Paul, Minnesota i USA som arrangeras av ION. Flera deltagare från förra årets tävling ställde upp och förra årets vinnare, Ohio universitet, kammade hem guldet även i år med en förbättrad version av sin snöplogarrobot M.A.C.S.
Tävlingen går ut på att konstruera en helt autonom snöplog som ska ploga bort snö så bra som möjligt på kortast möjliga tid. All form av fjärrstyrning är absolut förbjudet och ifall roboten måste flyttas och börja om får laget kraftiga poängavdrag. I årets tävling deltog sex olika robotsnöplogar och överlägsen vinnare blev M.A.C.S. (Monocular Autonomously Controlled Snowplow) från Ohio universitet som fick hela 101,41 procent av totalt 100 procent.
Anledningen till att de kunde få mer än 100 procent är att lagen kan få upp till 5,0 procentenheter i bonus om de klarar av att ploga banorna på kortare tid än 20 minuter. Silvret gick till Redblade från Miami universitet med 72,13 procent och tredjeplaceringen till Yeti 2.0 från Michigans universitet, Dearborn, med 62,94 procent. Samtliga lags poäng för de olika delmomenten kan läsas här.
Banorna som ska plogas består av en I-formad och en U-formad. Den I-formade banan är en meter bred och tio meter lång och den U-formade är som två I-formade banor som binds samman i ena änden, vilket innebär att robotsnöplogarna även måste klara av två 90 graderssvängar.
Laget från Ohio universitet ställde upp med sin 250 kilo tunga robotsnöplog M.A.C.S. även i år, men hade denna gång gjort åtskilliga förbättringar. Robotplogen, som använder sig av laserbaserad LIDAR för navigation (precis som Googles självkörande bil), hade fått nya motorer, nya motorkontroller, uppgraderad metallram, bättre navigationsalgoritmer och förbättrad kontrollmjukvara.
Den officiella tävlingsvideon med samtliga deltagare har ännu inte lagts ut på nätet, men håll utkik på Robotnyheters twitterkanal för att bli informerad om när denna artikel uppdaterats med videon. Fler foton från M.A.C.S.-laget kan ses här och här.
Förhoppningsvis kan tävlingar som dessa ge upphov till kommersiella produkter i framtiden då marknaden för robotsnöröjare (via plog eller snöslunga) borde vara tämligen stor, inte minst här i Norden med vårt kalla klimat. Mer om robotsnöröjare kan läsas i artikeln under ”SE ÄVEN” här nedan.
Foton från tävlingen
 Snön som ska plogas placeras i 1 x 1 meters rutor.
Snön som ska plogas placeras i 1 x 1 meters rutor.
 Den U-formade banan är färdig.
Den U-formade banan är färdig.

 Snömannen var också på plats.
Snömannen var också på plats.
Vinnarroboten M.A.C.S.
 M.A.C.S. plöjer allt som råkar komma i dess väg.
M.A.C.S. plöjer allt som råkar komma i dess väg.


Redblade från Miami University








Yeti 2.0 och Geili från University of Michigan, Dearborn







 Notera speciallösningen med konerna som droppar varmvatten på hjulen för att hålla dem snöfria.
Notera speciallösningen med konerna som droppar varmvatten på hjulen för att hålla dem snöfria.


Snowdevils 2 – Dunwoody College of Technology



Se ännu fler foton på Facebook.
Autonomous Snowplow Competition
SE ÄVEN:
Thanks for posting this article!
We had lots of fun creating this robot, testing it, and competing with other universities. It has been quite the challenge to make a robot that is strong enough to plow piles of snow, and is able to autonomously follow a path with high accuracy, and at high speeds.
Our robot M.A.C.S. operates at speeds up to 2 m/s, during which it maintains a cross-track error of less than 5 cm while plowing snow (and other obstacles). To do this, we use a laser to find the robot’s position within about 2 cm, which we use to steer the robot in the right direction, with an update rate of 5 Hz. A low-level controller continuously adjust the robots heading with an update rate of 50 Hz, by adjusting the differential wheel speeds. Combined we have a robot that follows the intended path with high precision.
It also became clear that you basically need a tank to plow snow: heavy (> 250 kg), lots of power (4 wheel drive, more than 5 HP total, peak currents are over 200A at 24V per 2 motors) and a very sturdy frame.
Next year we’re planning on adding a pneumatic plow which we can automatically rotate and lift. On top of that, we will add some algorithms that will detect when the robot gets stuck, followed by backing up, and then ramming into whatever is in its way :) (and yes, we do have some rather stringent safety systems…)