
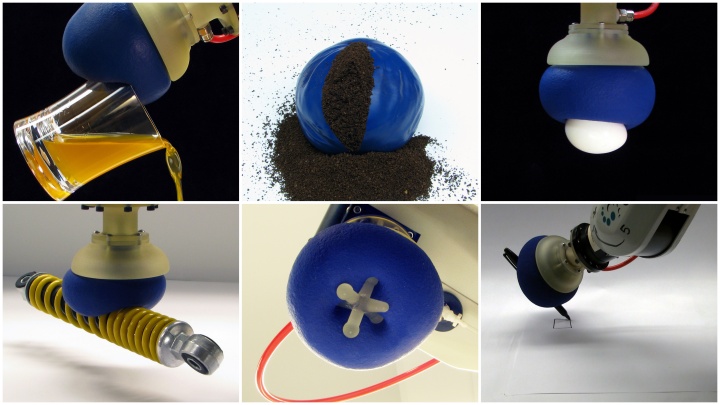
Den kaffebaserade universalgrippern kan lyfta det mesta, till och med råa ägg. Foto: John Amend, Cornell University
Ibland är de enklaste lösningarna de bästa och ett exempel på detta är denna universella robotgripper som kan lyfta objekt av högst varierande form och fragilitet. Detta inte tack vare superavancerade robotfingrar utan en enkel ballong fylld med vanliga malda kaffebönor.
För alla kaffedrickare är det ett välkänt faktum att kaffepaketet är stenhårt i butiken när man köper det. När man sedan kommer hem och öppnar det så bryts vakuumet i förpackningen och plötsligt är paketet mycket mjukare. Det är på ett liknande vis denna universalgripper fungerar.
Man utnyttjar det faktum att de malda kaffebönorna är mjuka och formbara i luftig förpackning men blir mer som fast materia i vakuummiljö. Kaffekornen packas då så tätt mot varandra att de inte kan glida omkring och därmed hålls objektet fast. När luften sedan släpps in i ballongen igen minskar greppet.
Universal Jamming Gripper har tagits fram i ett samarbete mellan Cornell University, University of Chicago och iRobot och har sitt ursprung i ett DARPA-finansierat program med syfte att ta fram en ny sorts mjuka robotar. Robotar har ju annars traditionellt tillverkats av hårda material som metall eller plast. I videon nedan får vi en demonstration av grippern.

Den stora styrkan i grippern, förutom att den är enkel och billig, är att den kan lyfta i princip alla sorters föremål och dessutom utan att i förhand behöva veta hur de ser ut. I vanliga fall behöver objekten först analyseras för att hitta optimala greppytor. Grippern kan till och med lyfta ömtåliga objekt som råa ägg och vinglas. Däremot inte extremt mjuka saker som bomullsbollar, berättar Eric Brown från University of Chicago för IEEE Spectrum.
Den handstora robotgrippern har lyckats lyfta upp till 6,8 kilo tunga objekt och tekniken är dessutom skalbar. Skulle man skala upp grippern till en diameter på en knapp meter skulle den kunna lyfta en bil, säger Brown. En gripper av detta slag skulle kunna bli väldigt användbar på en plockrobot där små serier av något tillverkas eller där produkterna är av varierande storlek och form. Det är kanske främst inom livsmedelsindustrin det finns en stor potential.
En annan fördel med tekniken är att grippern kan lyfta två eller flera objekt samtidigt och därmed spara tid. Ju mindre objekt desto fler kan förstås lyftas samtidigt. Man kan tänka sig en gripper som plockar godis på ett löpande band och istället för att plocka dem en och en kan flytta flera godisbitar i samma lyft.
Nu har man även lärt sig använda grippern, som ursprungligen togs fram 2010, för att kasta iväg saker. Detta genom att snabbt tillföra luft till ballongen efter att den greppat ett objekt och på så vis stöta bort det. Med en precision på +/-60 millimeter är den kanske inget man sätter på industriella högprecisionsuppgifter, men det duger bra till att sätta tre pingisbollar i rad i en miniatyrbasketkorg, spela dart och annat som kan ses i videon här under. Rent industriellt skulle man kunna använda det till en form av snabbsortering i olika lådor.