När människor och djur går och springer anpassar vi automatiskt fjädringen i benen beroende på underlag med mera. För robotar är det lite mer komplicerat. Nu finns en hexapod som kan justera hur mycket benen ska fjädra beroende på underlag.
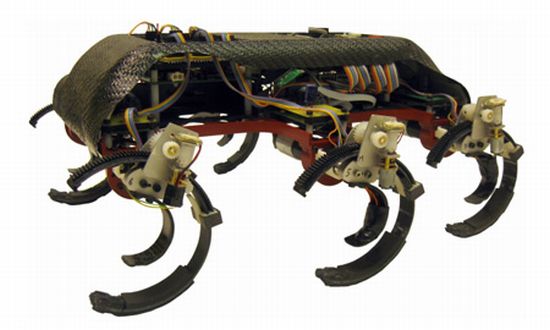
EduBot heter den hexapod som nu alltså fått variabel fjädring i benen och det är en snabb liten rackare.
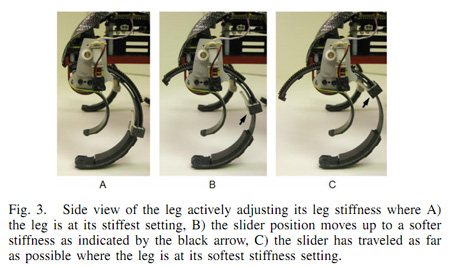
Benen är gjorda av kolfiber och påminner mycket om de benproteser som amputerade löpare använder samt benen hos löparroboten Athlete. De fungerar som böjda glidskenor och kan med hjälp av servon justeras i båda riktningarna för att variera fjädringen i varje ben. Se bild.
Generellt sett springer EduBot snabbast och effektivast med styvare fjädring på hårda underlag, men på gräs och andra underlag kan mjukare fjädring vara bättre. Roboten har testats på många olika underlag både med och utan last och det tog utvecklarna i snitt 70 försök varje gång för att hitta de optimala inställningarna.
Roboten kan än så länge inte justera benen under tiden den går eller springer utan måste stanna, justera benen och sedan fortsätta. Men det är i alla fall ett steg i rätt riktning.
Boston Dynamics, som bland annat utvecklar den fyrbenta Big Dog och bipedala roboten Petman har tagit fram en kommersiell hexapod som tål riktigt tuff terräng och är vattentät. Den kan även dyka om benen byt uts mot fenor. RHex heter den och kan ses i videon nedan.
http://www.youtube.com/watch?v=pNi2ytOdbTY
SE ÄVEN: